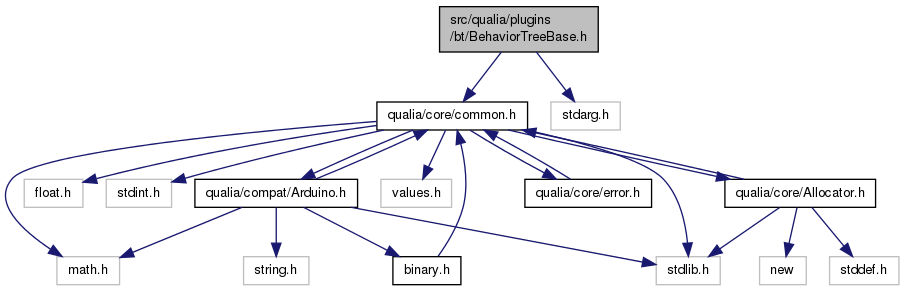
Include dependency graph for BehaviorTreeBase.h:
This graph shows which files directly or indirectly include this file:

Go to the source code of this file.
Classes | |
| class | BehaviorTree::BehaviorTreeNode |
| Abstract base clase for Behavior Tree Nodes. More... | |
| class | BehaviorTree::BehaviorTreeInternalNode |
| Abstract base class for Behavior Tree nodes with children. More... | |
| class | BehaviorTree::BehaviorTreeDecoratorNode |
| Abstract base class for Behavior Tree nodes with exactly one child. More... | |
| class | BehaviorTree::AlwaysRunning |
| Always returns the BT_RUNNING status. More... | |
| class | BehaviorTree::AlwaysSuccess |
| Always returns the BT_SUCCESS status. More... | |
| class | BehaviorTree::AlwaysFailure |
| Always returns the BT_FAILURE status. More... | |
| class | BehaviorTree::SuccessAfter |
| Returns BT_RUNNING for the specified number of iterations, then returns BT_SUCCESS after that. More... | |
| class | BehaviorTree::FailureAfter |
| Returns BT_RUNNING for the specified number of iterations, then returns BT_FAILURE after that. More... | |
Namespaces | |
| namespace | BehaviorTree |
Typedefs | |
| typedef uint8_t | BehaviorTree::FAILURE_POLICY |
| Enumerates the options for when a parallel node is considered to have failed. More... | |
| typedef uint8_t | BehaviorTree::SUCCESS_POLICY |
| Enumerates the options for when a parallel node is considered to have succeeded. More... | |
Enumerations | |
| enum | BehaviorTree::BEHAVIOR_STATUS { BehaviorTree::BT_SUCCESS, BehaviorTree::BT_FAILURE, BehaviorTree::BT_RUNNING } |
| Enumerates the states every node can be in after execution during a particular time step. More... | |
| enum | BehaviorTree::TRAVERSAL_POLICY { BehaviorTree::RESTART, BehaviorTree::CONTINUE } |
| Enumerates the options for when a priority node returns BT_RUNNING. More... | |
